-
Hii小伙伴们
我们是自变量机器人,具身智能独角兽,国内唯一家同时被小米、字节、阿里、美团投资的具身智能公司,百亿估值,总部在深圳,在北京也有研发团队,在上海也即将会开office。我们是做具身智能大脑起家,是国内具身智能大模型第一梯队,真机数据也是最大规模。我们目前机器人形态包括轮式仿人形、灵巧手等。我们 ...
-
openlonng 的开源代码只有控制部分的,麻烦问一下有没有状态观测部分以及步态规划部分,万分感谢。我看这个开源还挺好,已经推荐给同事了
-
如题,差不多是现实时间的1/60
-
使用pinocchio求解机器人运动学和微分运动学,所计算的位置是joint锚点的位置,而不是足端body的,这种情况一般如何处理呢?
-
在OpenLoong的基础上适配智元灵犀X1机器人的URDF,基于ROS2优化了所有代码结构,并且搭建了Mujoco和Gazebo两类仿真。
当前的状态是:Mujoco下Walk步态效果很好,总体表现正常;于是紧接着迁移到Gazebo下继续验证动力学泛化能力,结果步态“凌乱”。
详细排查问题,目前确定是现有WBC框架中,按照常 ...
-
看到pino_kin_dyn中定义了hip_joint和hip_roll_joint,但是发现在代码文件中没有用到它们,只有doc中有用到,想问下各位大佬这个在哪里使用了,修改是否对计算有什么影响?
-
尊敬的青龙开发人员,以及社区的大佬们:
青龙的开源代码给定了一个md文件,大致把移植的方法都写了出来,即对上关节,然后修改手臂,腰等关节的索引,对上pino(运动学cpp)和wbc_priorty(wbc参数),然后微调一下关节的pd参数即可。我用宇树h1模型进行迁移的时候,非常顺利,一天搞定,唯一遇到的问题在于,需要在主c ...
-
本次分享的内容是基于MPC与WBC的人形机器人控制。主要分为两个部分,一个是控制算法的概述,一个是关于pinocchio动力学求解库的内容。
一、控制算法的概述
整个控制框架图,如下所示,算法分为,步态控制、外部接触控制、内部多关节协同控制、底层关节跟踪与感知模块。
主要介绍下外部接触模块与内部多关节协同模块:
外部 ...
-
一、遥操作与数据收集 (Teleoperation & Data Collection)
| TWIST Teleoperated Whole-Body Imitation System
| (CoRL 2025)
|✅ 开源`github.com/YanjieZe/TWIST` | 全身遥操作系统,实现全身协调控制 |
| TWIST2 Scalable, Portable, and Holistic Humanoid Data Collection System
| (Nov 2025)
| ✅ 开源`yan ...
-
大佬们,请问测试dyn-control时,运行walk_mpc_wbc机器人直接起飞是什么原因呢?请各位大佬不吝赐教,感谢大佬的帮助
-
各位开发者好,我目前在将全身控制的代码迁移到ros环境下。
目前在仿真环境下验证消息收发的正确,但发现在ros节点创建mujoco窗口后,运行效率极大降低,原来在单mujoco环境下可以正确行走的程序,在ros节点下无法正确行走。请问大家有遇到类似情况吗?或者在迁移其他代码的时候遇到过类似情况吗?
...
-
这个库里应该有一个 Jnt::ankleClass,并且明确有这些函数:mot2ank / ank2mot / calJcb / calJcbInvT。这说明它把脚踝当成 2 电机耦合的 2 自由度机构,用雅可比/J做位置/力矩的变换。找遍了所有的文件夹,好像是没有上传。
-
在过去两年,“具身智能”成为人工智能与机器人领域的高频热词。大模型的突破让机器具备了更强的认知与理解能力,但如何把“会思考”与“会行动”真正结合在一起,仍然存在实时性、能效与算力三方面的工程性矛盾。针对这些矛盾,技术界正在实践一种受启发于生物认知分工的技术路径:大小脑协同架构,并通过算控一体化的软硬 ...
-
尊敬的青龙开发人员,以及社区的大佬们:
我参照你们的模型替换说明OpenLoong-Dyn-Control/Tutorial.md at main · loongOpen/OpenLoong-Dyn-Control · GitHub进行自己机器人模型(25自由度,单手5个自由度+单腿5个自由度,腰3个,头2个)的替换,但是在启动之后出现了以下问题:
1)如果将机器人base_link设置为 ...
-
在OpenLoong高校行·上海大学站活动中,来自卓益得机器人的产品副总裁唐俊,为我们带来了团队十年技术研发的完整回顾:从“行者一号”刷新吉尼斯世界纪录,到“行者二号”引入肌腱仿生驱动实现续航、安全、灵活性三重突破,分享背后隐藏的技术机制与演进逻辑。
附件为演讲素材,欢迎大家浏览交流~
...
-
这两个参数应该是WBC控制求解QP问题的优化项个数和约束个数,项请教一下为什么是18和22。导入自己的模型后需要修改吗?
-
运行青龙开源代码walk_wbc会报ERROR: Premature homotopy termination because QP is infeasible
->ERROR: Initial QP could not be solved due to infeasibility!
-
在动力学控制中,除了上一贴说到的动力学模型,我们也需要知道机器人的结构、外形、运动学特性等,尤其是要将一套运动控制算法部署到一台新机器人上时,如何让算法知道被控对象已经被更换了呢?通常采用机器人模型描述文件对机器人的构型进行描述,通过更换算法中描述文件的方式,替换算法被控对象,事实上动力学模型也可以 ...
-
在动力学控制详解系列中,我们选择将机器人建模放第一章,这是考虑到机器人建模在后续算法设计、仿真及实物部署中的重要基础作用,机器人建模包括动力学建模、机器人模型描述文件的导出、机器人动力学求解。
本篇主要探讨动力学模型部分。
1、什么是动力学模型
动力学模型,简单来说就是描述物体在力和力矩作用下会进行怎 ...
 OpenLoong大师赛第一期正式启动啦,速来报14 人气#OpenLoong大师系列赛
OpenLoong大师赛第一期正式启动啦,速来报14 人气#OpenLoong大师系列赛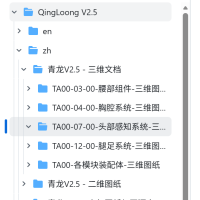 青龙硬件的部分step文件下载不了44 人气#硬件设计
青龙硬件的部分step文件下载不了44 人气#硬件设计 学校买教育机器人,为什么很多最后都吃灰?157 人气#教育机器人
学校买教育机器人,为什么很多最后都吃灰?157 人气#教育机器人 零次方机器人期待您的加入444 人气#工作机会
零次方机器人期待您的加入444 人气#工作机会
 关注B站
关注B站 关注抖音
关注抖音 关注微信公众号
关注微信公众号