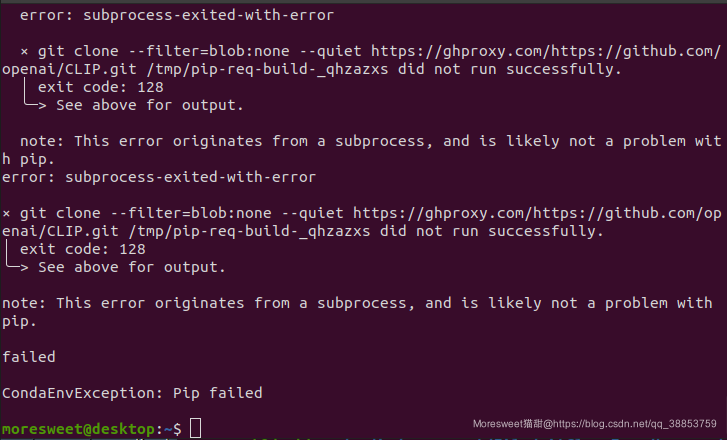
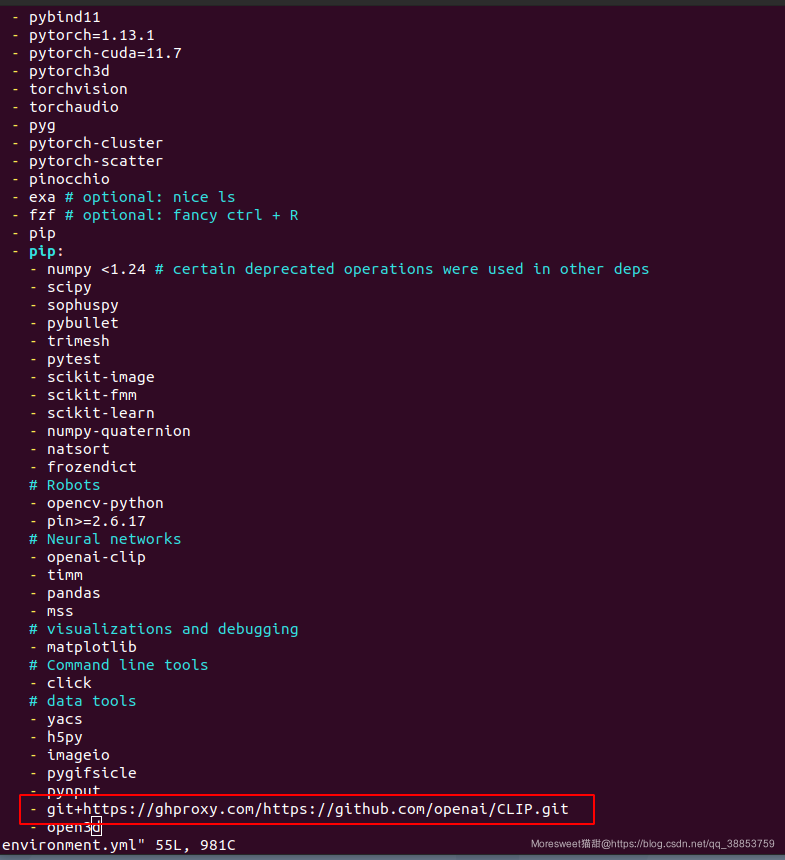
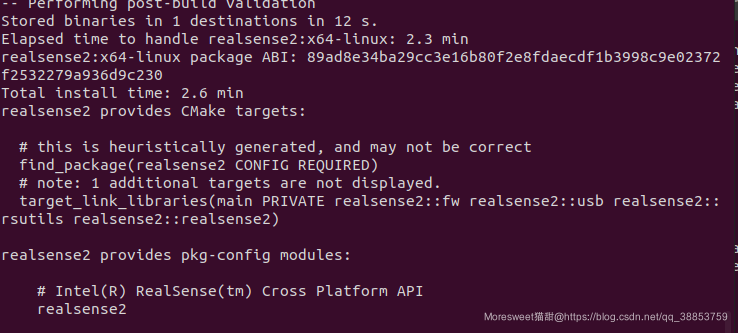
sudo apt updatesudo apt install build-essential zip unzipgit clone https://github.com/facebookresearch/home-robot.gitcd ./home-robot# If using ROS - make sure you don't have PYTHONPATH setunset PYTHONPATH# Otherwise, use the version in src/home_robotmamba env create -n home-robot -f src/home_robot/environment.yml# Activate the environmentconda activate home-robot# Optionally, update this environment to install ROSmamba env update -f src/home_robot_hw/environment.ymlexport HOME_ROBOT_ROOT=$HOME/home-robotexport CUDA_HOME=/usr/local/cuda-11.7conda activate home-robotcd $HOME_ROBOT_ROOT./install_deps.sh
cd cd home_robot_hw/pip install -e . 3.2 AttributeError: module ‘numpy’ has no attribute ‘float’.
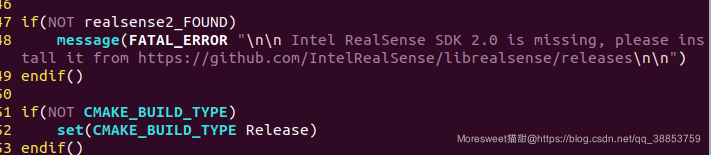
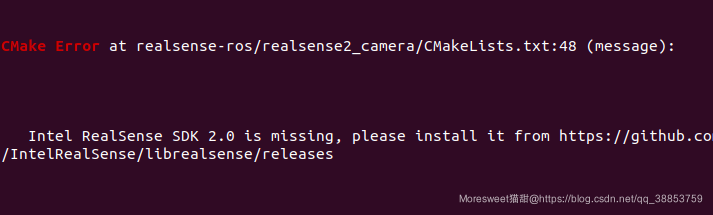
AttributeError: module ‘numpy’ has no attribute ‘float’.
np.float was a deprecated alias for the builtin float. To avoid this error in existing code, use float by itself. Doing this will not modify any behavior and is safe. If you specifically wanted the numpy scalar type, use np.float64 here.
The aliases was originally deprecated in NumPy 1.20; for more details and guidance see the original release note at: https://numpy.org/devdocs/release/1.20.0-notes.html#deprecations

 关注B站
关注B站 关注抖音
关注抖音 关注微信公众号
关注微信公众号