-
随着机器人技术和人工智能的发展,仿真平台已成为研究人员、开发者和企业不可或缺的工具。这些平台为机器人和算法的设计、测试、验证提供了高效、低成本的虚拟环境。本文将介绍当下主流的机器人仿真平台,包括其特点、适用场景以及优缺点,帮助大家选择最适合的工具。
1. Gazebo
特点: • Gazebo 是最早流行的开源机器人 ...
-
🌐 环境配置
我们使用的开发环境如下: • 系统: Ubuntu 22.04 • 编程语言: Python 3.9 • 工具链: Anaconda • CUDA: 12.1 • Cudnn: 配套版本 • PyTorch: 2.1.1 + cu121 • Minkowski Engine: 12.1
配置关键步骤
1. 设置 CUDA 环境变量:
export CUDA_HOME=/usr/local/cuda-12.1export TORCH_CUDA_ARCH_LIST="8.9"
...
-
我们基于开源系统 Mobile ALOHA,针对通用机械臂作业任务,开发了支持 任意自由度机械臂 的示教数据采集、模仿学习训练和推理测试的完整解决方案。
系统功能与架构
1. 数据采集模块
通过仿真或样机采集机械臂示教数据,输出为统一的 h5df 格式,具体包括:•视觉数据:三个相机的 RGB 图像(top, left_wrist, right_wrist ...
-
[*]简介
你是否想过,机器人可以像人类一样学习运动技能和自主执行任务?本文将为你揭秘一款名为 HumanPlus 的全栈式系统,它不仅能让机器人从人类动作数据中学习,还能在实际场景中自主完成复杂任务。🎯
通过 HumanPlus,我们可以实现让人形机器人模仿人类动作。这是如何做到的呢?首先,通过部署低级别控制策略,使得 ...
-
Ed-Lora 是一种基于 LoRA(Low-Rank Adaptation)技术的扩展应用,主要用于视频和图像的细节增强与画质提升。LoRA 技术是一种深度学习领域的参数高效调优方法,可以在保持模型核心结构的同时,通过少量参数实现模型的定制化训练。Ed-Lora 在此基础上,通过输入高分辨率图片、掩膜和描述文本来优化视频或图像的分辨率、清晰 ...
-
本篇文章会介绍我们基于Mobile ALOHA系统,针对多样化复杂场景中人形机器人的遥控操作与自主作业展开研究,开发基于Transformer的模仿学习训练框架,部署于青龙全尺寸仿人机器人,实现了典型任务的自动化数据生成与作业控制,助力未来机器人项目发展。之后的文章我会详细介绍Aloha项目的复现过程,模型对比,以及我们在此基 ...
-
本片内容会对aloha在虚拟环境的任务进行逐一复现,包含详细内容和常见错误解决方案。
数据采集模块从仿真/样机收集数据,采集内容包括'top', 'left_wrist', 'right_wrist'3个相机RGB图像(3,3,630,480),以及双臂关节角qpos,actions。输出为h5df统一格式。
安装 Robomimic https://github.com/ARISE-Initiative/robomim ...
-
policy对比: 任务1 sim_transfer_cube_scriptedDiffusion Policy
"ENABLE_EMA = True" 会出现报错"nets = self.ema.averaged_model" ,所以改为"ENABLE_EMA = False",可以训练。
在2000steps后的ACT得到20%成功率,我们现在用Diffusion Policy,同样的2000steps:
Diffusion Policy 5000 steps:
Diffusion Policy ...
 OpenLoong大师赛第一期正式启动啦,速来报18 人气#OpenLoong大师系列赛
OpenLoong大师赛第一期正式启动啦,速来报18 人气#OpenLoong大师系列赛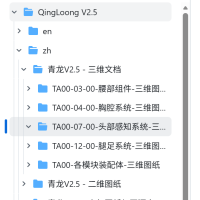 青龙硬件的部分step文件下载不了53 人气#硬件设计
青龙硬件的部分step文件下载不了53 人气#硬件设计 学校买教育机器人,为什么很多最后都吃灰?163 人气#教育机器人
学校买教育机器人,为什么很多最后都吃灰?163 人气#教育机器人 零次方机器人期待您的加入448 人气#工作机会
零次方机器人期待您的加入448 人气#工作机会
 关注B站
关注B站 关注抖音
关注抖音 关注微信公众号
关注微信公众号