-
rnea.hxx 文件实现了 Recursive Newton-Euler Algorithm (RNEA) 算法家族,这是机器人动力学中的经典算法,主要用于计算:
[*]关节力矩:给定机器人的位置、速度和加速度,计算所需的关节驱动力矩
[*]非线性效应:计算科氏力和离心力
[*]广义重力:计算重力对关节的影响
[*]静力矩:计算静态平衡时的关节力矩
[*]科氏矩阵: ...
-
(基于aba.hxx)ABA (Articulated-Body Algorithm) 是一种高效的前向动力学算法,用于计算机器人关节加速度。以下是基于 aba.hxx 实现的核心数学公式:1. 算法概述ABA算法分为三步:
[*]正向传播:计算关节位置、速度和科氏力
[*]反向传播:计算铰接体惯性和力
[*]正向计算:计算关节加速度
2. 正向步骤1:位置、速度和科氏 ...
-
一、CRBA算法概述CRBA(Composite Rigid Body Algorithm)是计算机器人关节空间惯性矩阵(Joint Space Inertia Matrix, JSIM)的经典算法,由Featherstone于1983年提出,具有 O(n) 的时间复杂度,是机器人动力学中的核心算法之一。核心功能
[*]计算关节空间惯性矩阵 ( \mathbf{M}(\mathbf{q}) ) 的上三角部分
[*]可选计算质 ...
-
核心定位:“动力学计算内核”的战略价值
在机器人技术的广阔版图中,存在多种用于模拟、规划和控制的软件工具。然而,要深刻理解 Pinocchio 的独特价值,首先必须明确其精准的战略定位——它并非一个功能全面的完整仿真环境,也不是一个包含高级任务规划的端到端解决方案 [[2]]。Pinocchio 被精确定义为一个**“动力学 ...
-
无论是使用操控手柄让人形机器人步态行走,还是遥操作、模仿学习、自主抓取等让机械臂智能作业,都离不开人形机器人小脑的运动控制和大脑的感知计算的相互配合。本文将从软件层面介绍人形机器人大小脑的功能和组成,帮助用户理解人形机器人的整体功能。
1 整体软件架构
如图1所示,人形机器人由三大核心模块组成:运动控制 ...
-
在上一篇帖子《如何让机械臂到达我们期望的位置:两自由度机械臂模型的控制》中,我们可以让机械臂在关节端到达期望的位置点;但是机械臂在这个过程中是否连续、平稳是完全没有考虑到的。在上一篇帖子《如何让机械臂到达我们期望的位置:两自由度机械臂模型的控制》中使用PD控制机器人关节时,虽然机械臂关节最后能够到达给 ...
-
在现代机器人技术中,双臂机器人的应用场景非常广泛,例如工业制造、物流分拣、外科手术等。双臂末端位姿锁定算法是双臂协作中一个关键的算法,用于确保两只机械臂末端在空间中的协调一致。这篇文章将介绍双臂末端位姿锁定算法的基本概念、原理及其应用场景。
1. 什么是双臂末端位姿?
在讨论双臂末端位 ...
-
1、机械臂无外力作用下运动
1.1 机械臂初始竖直状态下的运动
1.2 机械臂初始水平状态下的运动
当机器人初始位置为水平状态时,由于受重力作用,机器人会从当前位置下落,做自由摆动。
2、机械臂的控制
控制机械臂的问题可以表述为确定由关节致动器产生的广义力(力或扭矩)的时间历程,以确保执行命令的任务,同时满 ...
-
机器人学是一门特殊的工程科学,其中包括机器人设计、建模、控制以及使用。如今机器人越来越多的出现在人们的生活中,协助或者取代的人们的工作。而机器人的使用范围也非常的广,从机器人玩具到家庭中的协作机器人再到工业机器人。未来,机器人在的发展中会扮演越来越重要的角色。
从本质上来说,机械臂必须要无穷分布参数 ...
-
遥操作(Teleoperation)在机器人行业中扮演着至关重要的角色,不仅在无人驾驶(Autonomous Driving)领域中广泛应用,还在各类机器人系统中发挥了巨大的作用。遥操作技术使得操作员可以远程控制机器人执行任务,特别是在危险、复杂或人类难以进入的环境中,提供了确保任务顺利执行的可靠技术【1】。
遥操作的定义及应用场 ...
 OpenLoong大师赛第一期正式启动啦,速来报18 人气#OpenLoong大师系列赛
OpenLoong大师赛第一期正式启动啦,速来报18 人气#OpenLoong大师系列赛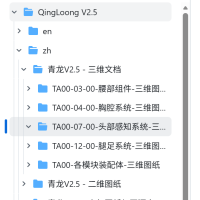 青龙硬件的部分step文件下载不了53 人气#硬件设计
青龙硬件的部分step文件下载不了53 人气#硬件设计 学校买教育机器人,为什么很多最后都吃灰?162 人气#教育机器人
学校买教育机器人,为什么很多最后都吃灰?162 人气#教育机器人 零次方机器人期待您的加入448 人气#工作机会
零次方机器人期待您的加入448 人气#工作机会
 关注B站
关注B站 关注抖音
关注抖音 关注微信公众号
关注微信公众号